


本平台旨在为智能汽车的智能座舱、人机交互HMI、用户体验测试、自动驾驶测试、驾驶行人心理测试等系统的开发、测试、验证与演示提供支持,通过智能汽车开发测试一体化仿真平台和场景库组合,满足用户开发和体验测试的多传感器选择配置、多车型适配、多主机厂客户等的需求,为智能汽车产品开发和测试人员在不同开发阶段提供不同的使用方式选择。
平台特点:
开发环境友好:支持Matlab/Simulink、NI、C、C++、Python等多种开发语言。
置信度高:基于可定制的高逼真复杂仿真场景,以可灵活配置的高精度传感器模型为支撑,融合真实世界采集数据与仿真数据。
应用广泛:通过模块化定制可广泛应用于车载传感数据处理、ADAS、无人驾驶系统、智能网联车端OBU、路端RSU、云端交通管控平台开发。
外部扩展:支持二次开发、第三方集成、测试评价体系接入等,包含:被测算法、感知模型、场景模型、交通模型、评价模型等对接;
Demo示例:软件包自带丰富的测试场景库和测试用例,所有的场景模型以及系统控制算法完全对用户开放;
实时性强:支持高精度车辆动力学模型的实时在线运算,可与被测单元集成,支持扩展多种接口参数。
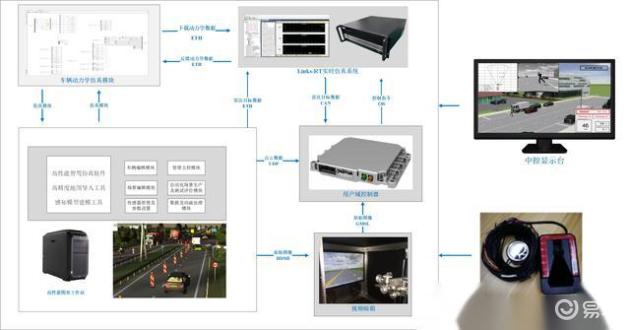
实时仿真器
灵思创奇Links-BOX实时计算机主要用于高精度车辆动力学模型的实时在线运算,并支持上位机与下位机的通讯,下位机支持模拟一辆真车的运行及数据接受和输出方式,与用户的被测单元集成,支持扩展多种接口参数。

应用功能:
可下载并调用模型数据,进行实时仿真计算;
与人机交互系统进行通信,接受驾驶员的输入,并将计算结果反馈给驾驶员;
与外接扩展系统进行通信,接受控制器的输入,并反馈给控制器车辆信息。
融合传感数据,通过人机共驾决策判断并切换车辆运行控制模式;
可调用自动驾驶控制算法,进行实时仿真计算;
支持各种数据标准格式传输,满足用户L3级别域控制器接口需求;
配套Links-RT实时仿真软件包完整开发许可证,支持用户自定义开发服务。
高逼真力感反馈系统
统提供方向盘力感系统和真实制动系统,从而使驾驶员在虚拟驾驶时能够感受到真实的方向盘回力和制动踏板反馈力;提供与国内顶尖高校联合开发的高鲁棒性、高精度方向盘力感系统,能够有效地将模拟道路信息以力感形式反馈给驾驶员,改善驾驶体验。

视频仿真黑箱在环系统
采用由摄像头作为图像信号采集处理单元进行硬件在环仿真,在暗箱中,由工控机生成暗箱中显示器虚拟场景画面,摄像头拍摄虚拟场景画面,实时采集传感数据,输出至传感数据处理单元供图像处理器进行数据处理,并将处理结果传输给用户控制器,最后通过控制算法对进行车辆闭环控制。
摄像头暗箱在环实现流程如下图所示:

摄像头硬件在环实现流程
采用真实摄像头在环功能性能:真实摄像头数据采集传输;为道路实测提高系统置信度;满足用户图像传输延迟;具备输入输出接口以方便显示屏幕和摄像头与其他外部设备的数据传输。支持各种智能摄像头标定;支持仿真软件动画、行车记录仪视频信息播放。